The monthly PGR meeting was held on Wednesday 8th June, 14:00-16:00, Room MC3108.
This month speaker was Dr Saddam Bekhet who gave a talk on his latest research findings. The title of his talk was ‘Signature-based Videos’ Visual Similarity Detection and Measurement’.
Dr Massoud Zolgharni and Dr Marc Hanheide also discussed different issues including:
- presentations schedule
- encouragement of PGR students to participate in monthly meetings and present their work
- PGR progress
The date and venue for the next meeting will be announced.
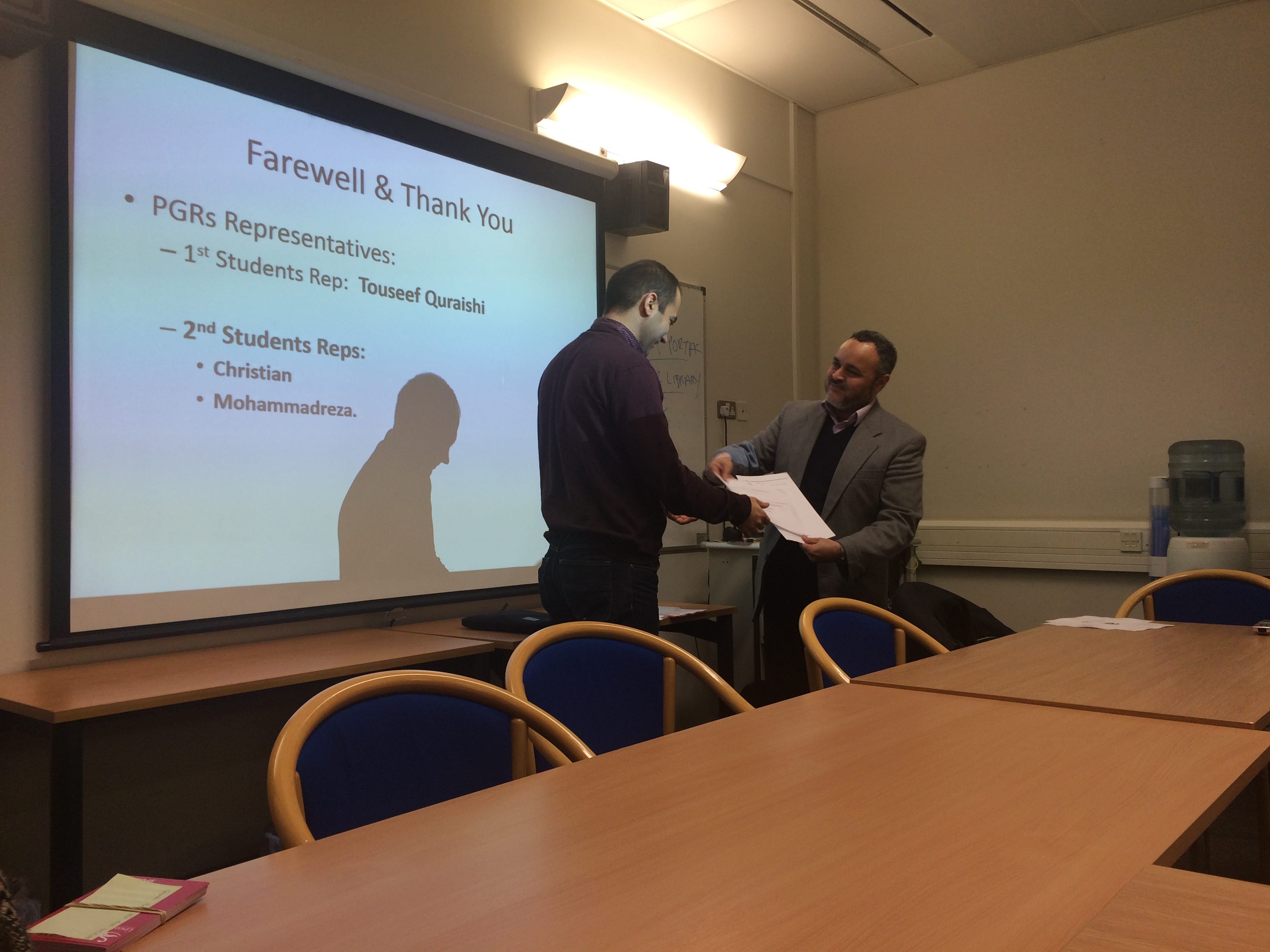
![IMG_20160512_141102[1]](https://postgraduates.blogs.lincoln.ac.uk/files/2016/05/IMG_20160512_1411021.jpg)
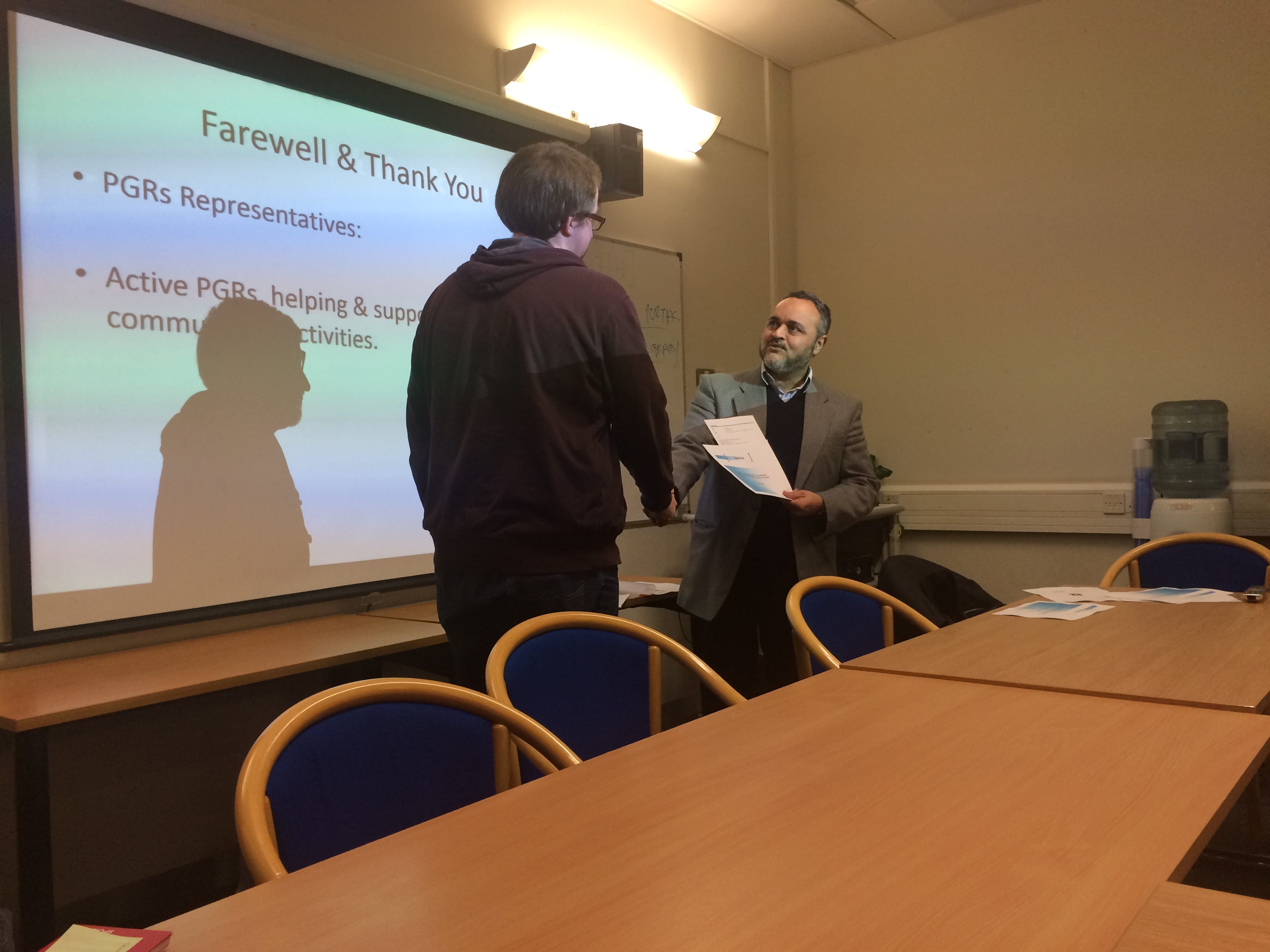
![IMG_20160512_141059[1]](https://postgraduates.blogs.lincoln.ac.uk/files/2016/05/IMG_20160512_1410591.jpg)
![IMG_20160512_141116[1]](https://postgraduates.blogs.lincoln.ac.uk/files/2016/05/IMG_20160512_1411161.jpg)